- Blender integra un potente sistema de simulaciones físicas que abarca colisiones, cuerpos blandos, telas, fluidos y campos de fuerza.
- Las pestañas Collision, Soft Body, Cloth y Fluid permiten ajustar parámetros clave como fricción, masa, rigidez, calidad y rangos de cálculo.
- Funciones avanzadas como pesos de vértices, pinning de telas y el uso del Game Engine para cuerpos rígidos amplían mucho las posibilidades creativas.
Si te llama la atención todo lo que se puede hacer con las simulaciones físicas en Blender, pero cada vez que abres los paneles de físicas te perdes entre pestañas y parámetros raros, tranquila, tranquilo: no eres la única persona. Blender trae un módulo de simulaciones tan completo que puede abrumar al principio, pero una vez entiendes la lógica básica, se vuelve una auténtica navaja suiza para navaja suiza para animación.
En este artículo vamos a repasar de manera detallada cómo funcionan las simulaciones con Blender más habituales: colisiones básicas, cuerpos blandos, simulación de telas y fluidos. Verás qué hace cada pestaña importante, qué parámetros conviene tocar al empezar y cómo se relacionan entre sí. La idea es que acabes con una base sólida para que puedas seguir investigando y sacarle jugo a todo el sistema de físicas sin morir en el intento.
Módulo de simulaciones físicas de Blender: visión general
Una de las cosas que más sorprende cuando se enseña Blender a alguien que viene de otros paquetes 3D es la potencia del módulo de simulaciones físicas integrado. Mucha gente reacciona con un “¿pero esto es software libre?” al ver lo que se consigue con partículas, cuerpos blandos, telas o fluidos sin pagar licencias privativas.
Dentro de los botones relacionados con el objeto, Blender agrupa sus herramientas de física en el panel de Simulaciones Físicas del objeto. Desde ahí se pueden activar y configurar las principales propiedades físicas que afectan a cada elemento de la escena, tanto si se trata de colisiones sencillas como de simulaciones complejas para animaciones más avanzadas.
En este panel se distinguen varias pestañas clave de simulación, organizadas en grupos. A grandes rasgos, tendrás pestañas para definir colisiones, campos de fuerza, cuerpos blandos, telas y fluidos. Cada tipo de simulación se gestiona desde su grupo correspondiente, aunque muchas veces se combinan entre sí (por ejemplo, una tela que necesita colisionar con otros objetos).
Conviene tener claro que, aunque con práctica puedes hacer casi de todo, el sistema de físicas de Blender es lo bastante profundo como para llenar fácilmente un curso entero. Aquí nos centraremos en las capacidades más importantes para empezar a trabajar con ellas, a modo de guía práctica y comentando los controles que más se utilizan al principio.
Para quien quiera profundizar al máximo en simulaciones físicas con Blender, existe una obra de referencia muy conocida: el libro de Tony Mullen “Bounce, Tumble and Splash!”, publicado por Sybex (ISBN: 978-0-470-19280-1). Es un volumen de nivel medio-avanzado que entra en detalle en temas como partículas, cuerpos rígidos y blandos, simulación de pelo, telas y muchos otros aspectos que van bastante más allá de una simple introducción.
Configurar rápidamente una simulación básica en Blender
Cuando quieres ver resultados sin complicarte la vida, Blender permite crear escenas o efectos de simulación básicos partiendo de los objetos seleccionados. Es decir, puedes seleccionar unos cuantos elementos en el visor 3D y, mediante las herramientas adecuadas, dejar que el propio programa añada lo que falta.
Este tipo de herramientas automáticas se encargan de incorporar a la escena objetos esenciales como dominios o emisores de partículas, ya configurados con ajustes por defecto que funcionan razonablemente bien. De esta manera, nada más darle al play en la línea de tiempo, verás un resultado claro sin tener que estar comprendiendo todos los parámetros desde el primer minuto.
El objetivo de este enfoque es que puedas probar efectos visuales de forma inmediata: caídas de objetos, partículas que rebotan, fluidos básicos… Luego, cuando ya veas algo que se acerca a lo que quieres, llega el momento de refinar la simulación tocando valores más precisos para controlar la calidad, el tiempo de cálculo y el aspecto final.
Aunque los presets ayudan mucho, es importante que no te quedes solo en ellos: la verdadera potencia del sistema de físicas viene de entender cómo se combinan las colisiones, fuerzas y propiedades del material (rigidez, fricción, masa, etc.) que veremos en los apartados siguientes.
Botón Collision y campos de fuerza en Blender
En la zona izquierda del grupo de simulaciones físicas encontrarás la pestaña Collision dedicada a las colisiones. Activar el botón principal de esta pestaña en un objeto indica al motor de físicas que debe tenerlo en cuenta al calcular choques con cuerpos blandos, telas o sistemas de partículas.
En cuanto marcas que un objeto participa en las colisiones, aparecen nuevos controles específicos, pensados para ajustar el comportamiento de cómo otros elementos se relacionan con su superficie. Estas opciones se aplican tanto a soft bodies y cloth como a partículas que impactan o resbalan sobre él.
Entre los parámetros más importantes de esta pestaña están el Damping (amortiguación), que determina hasta qué punto se “come” la energía del impacto. Un valor muy alto puede hacer que un cuerpo rebotando se comporte casi como una cama elástica, mientras que un valor más bajo dará colisiones más secas.
Otro parámetro crítico es la Friction (fricción o rozamiento), que indica cómo se deslizan los otros cuerpos sobre la superficie. Una fricción muy baja genera efectos resbaladizos, mientras que una alta hará que las telas o cuerpos blandos se queden más pegados al colisionar.
También encontrarás controles como Inner y Outer, que ajustan el “volumen de colisión” alrededor de las caras del objeto. Básicamente, amplían o reducen una especie de zona de seguridad para que la simulación trate las mallas como si tuvieran cierto grosor, ayudando a evitar que unas superficies se atraviesen unas a otras por errores de cálculo.
En otra pestaña importante, Fields, puedes definir campos de energía, como por ejemplo el clásico campo de tipo viento. Estos campos influyen en partículas, telas o cuerpos blandos, generando efectos como ráfagas que mueven ropa, partículas de polvo arrastradas por el aire o cualquier otro comportamiento basado en fuerzas direccionales.
Cuerpos blandos en Blender (Soft Body)
El simulador de cuerpos blandos, o sistema Soft Body de Blender, sirve para recrear objetos con cierto grado de elasticidad. Es ideal para simular cojines, gelatinas, estructuras semirrígidas o incluso para emular cuerpos rígidos con algo de flexibilidad si se usan los parámetros adecuados.
Cualquier objeto que quieras que participe en la simulación de cuerpos blandos tendrá que tener activado el botón Collision en la primera pestaña de colisiones. Una vez marcado, el motor tiene en cuenta ese objeto tanto como posible colisionador como, si se configura así, como cuerpo deformable sometido a la simulación.
En esta zona de configuración puedes distinguir dos grupos de opciones: por un lado, las que afectan a cuerpos blandos y telas; por otro, las que se aplican a sistemas de partículas. Aunque compartan ciertos parámetros, la lógica con la que actúan sobre cada tipo de simulación puede variar ligeramente, por lo que es buena idea hacer pruebas con configuraciones sencillas antes de meter modelos muy complejos.
Entrando en la pestaña SoftBody específica verás muchos controles pensados para definir la masa, la elasticidad y la forma en que la malla se deforma bajo la gravedad o las colisiones. Lo interesante del sistema es que puedes ir de comportamientos muy gomosos y exagerados a casi rígidos, todo según cómo ajustes los valores de la “estructura de muelles” que hay entre los vértices.
Parámetros principales de Soft Body
Uno de los primeros parámetros a revisar es la Friction del cuerpo blando, que en este contexto define el rozamiento del objeto con el resto de elementos que lo rodean. Un valor de 0 implica ausencia total de fricción, mientras que valores cercanos al máximo (por ejemplo, 50) hacen que el objeto se agarre mucho más a lo que toca.
La Mass (masa) asignada a los vértices controla cuánto pesa cada punto de la malla. Cuanto mayor sea la masa, más inercia tendrán los vértices al moverse, lo que influye en la forma de deformarse y en la sensación de “peso” del objeto blando al caer o chocar con algo.
El parámetro Grav (gravedad) ajusta la influencia de la gravedad sobre el cuerpo blando en el eje Z. Normalmente tendrá un valor negativo para que el objeto caiga hacia abajo. Un valor positivo o invertido puede crear efectos curiosos, como cuerpos que salen disparados hacia arriba, simulando entornos sin gravedad convencional.
La opción Speed permite controlar la velocidad aparente de caída y movimiento del objeto, simulando que es más o menos pesado sin tocar directamente la masa. No obstante, si incrementas demasiado la masa en combinación con ciertos ajustes, puedes provocar problemas como la interpenetración entre objetos, así que conviene jugar con Speed antes de disparar la masa.
El interruptor Use Goal es una herramienta muy potente, ya que, al activarlo, permite que el cuerpo blando se combine con otros elementos animables de la escena, como curvas de animación (IPO o F-Curves). Para que funcione correctamente, hay que definir grupos de vértices que actuarán como “puntos objetivo”. En una introducción básica no es imprescindible usarlo, pero a medio plazo resulta clave para controlar partes de la malla que deben seguir una animación concreta.
Otro parámetro básico es Use Edges, que hace que las aristas del objeto se comporten como si hubiera muelles virtuales tendidos entre los vértices. Esto le da al simulador una estructura interna que mantiene la forma del objeto y regula cómo se dobla o estira la malla frente a las fuerzas externas.
La opción Stiff Quads añade muelles internos en las diagonales de las caras cuadradas. Gracias a esto, las quads ganan rigidez y el objeto, en su conjunto, se comporta de forma mucho más sólida. Es un truco muy útil para lograr que un soft body se acerque al comportamiento de un cuerpo rígido pero con un punto de flexibilidad controlada.
Parámetros como CEdge y CFace indican al simulador que utilice aristas y caras para calcular internamente las colisiones con mayor precisión. Aunque mejora la calidad de los contactos, también puede ser muy lento en mallas con gran cantidad de polígonos, por lo que suele dejarse desactivado para prototipar y solo se activa cuando la precisión extra es realmente necesaria.
Los valores Pull, Push y Damp regulan la dureza de esos muelles virtuales que mantienen la forma del cuerpo. Valores bajos generan objetos muy elásticos y blandos, mientras que valores altos acercan el comportamiento a estructuras más firmes. Ajustando estos parámetros con algo de paciencia se consiguen desde efectos tipo gelatina hasta objetos semirrígidos que ceden lo justo.
El parámetro Plas (plasticidad) controla hasta qué punto las deformaciones producidas por golpes o colisiones se vuelven permanentes. Si su valor es mayor que cero, las abolladuras o deformaciones no desaparecen del todo cuando cesa la fuerza, dando como resultado superficies que se quedan marcadas.
Por último, Be (fuerza de curvatura) es clave para evitar que el cuerpo se doble de forma poco natural por las aristas. Un valor adecuado de Be ayuda a que las transiciones entre caras sean más suaves, manteniendo la ilusión de un objeto flexible pero continuo.
Uso de cuerpos blandos para simular cuerpos rígidos
Una aplicación interesante del sistema Soft Body es utilizarlo para emular cuerpos rígidos con cierta elasticidad, aprovechando opciones como Stiff Quads, el uso de edges y el ajuste cuidadoso de Pull, Push y Damp. El resultado son objetos que parecen duros pero que ceden mínimamente en colisiones intensas, logrando un aspecto más creíble que un sólido completamente inamovible.
Cuando se trabaja con este tipo de simulación, es habitual comenzar con escenas sencillas y mallas de baja resolución. Esto facilita los ajustes iniciales, ya que la complejidad de la malla influye mucho en el tiempo de cálculo y en la estabilidad de la simulación.
Con mallas más densas y varios niveles de subdivisión, se pueden conseguir efectos espectaculares tipo “gelatina” o objetos blandos que vibran tras el impacto. A costa, eso sí, de aumentar el tiempo de cómputo, por lo que conviene probar primero con una versión sencilla del modelo y solo después subir el nivel de detalle.
Cuerpos rígidos y motor de juegos (Game Engine)
Además de los cuerpos blandos, Blender incluye un simulador de cuerpos rígidos integrado en su antiguo Game Engine. Aunque no está concebido para integrarse de forma directa con el sistema de animación principal, aún se puede aprovechar para generar colisiones y dinámicas complejas entre objetos sólidos.
Para usar esta característica, hay que recurrir al grupo de botones de lógica del Game Engine, donde se definían antes las propiedades físicas de los objetos: tipo de cuerpo, colisiones, gravedad, etc. La simulación se ejecuta como si se estuviera reproduciendo un pequeño juego en tiempo real dentro de Blender.
Lo interesante es que, una vez que tienes una simulación de cuerpos rígidos que te convence, puedes volcar el resultado a curvas de animación. Esto se hace mediante la opción del menú principal Game > Record Game Physics to IPO (o su equivalente actual), que graba el movimiento generado por la física del motor de juegos como animación editable.
El manejo detallado del Game Engine y de su sistema lógico se escapa de una introducción centrada en las simulaciones físicas generales, pero es útil saber que existe esa posibilidad cuando necesitas colisiones complejas entre muchos cuerpos rígidos y quieres ahorrar tiempo de animación manual.
Simulación de telas en Blender (Cloth)
El sistema de simulación de telas de Blender comparte filosofía con los cuerpos blandos, pero está especialmente optimizado para mallas abiertas como planos, que son la base para modelar ropa, banderas, cortinas o manteles. Esto tiene mucho sentido, ya que en la realidad las prendas son superficies que no cierran volumen.
En la pestaña correspondiente al simulador de cloth encontrarás una serie de opciones pensadas para crear tejidos con comportamientos muy distintos. Blender incluye presets de material accesibles desde un desplegable llamado Material Preset, donde se pueden elegir configuraciones de cuero (leather), tela vaquera (denim), goma (rubber), algodón (cotton) o seda (silk), entre otros.
Estos presets configuran por ti muchos parámetros de rigidez, elasticidad y amortiguación, de modo que con unos pocos clics obtienes una tela ya razonablemente creíble. A partir de ahí puedes retocar valores a tu gusto para adaptarlos a la escena concreta que estés trabajando.
La calidad general de la simulación se regula con el parámetro Quality: a mayor calidad, más pasos de cálculo por fotograma y, por tanto, mejores resultados, pero también un incremento notable en el tiempo de simulación. Es típico empezar con una calidad moderada mientras se prueba la animación y subirla solo en el bake final.
Resulta muy recomendable activar el botón Enable selfcollisions dentro de la subpestaña Collision del grupo de Cloth. Esta opción permite que la tela detecte colisiones consigo misma, es decir, que tenga en cuenta los pliegues que se chocan entre sí. Aunque incrementa el tiempo de cómputo, es clave para lograr pliegues y arrugas realistas en mantas, ropa que se arremolina y tejidos que se doblan varias veces.
Como el simulador trabaja a nivel de cara poligonal, es fundamental que la geometría de la tela tenga una resolución suficiente pero no exagerada. Pocos polígonos darán pliegues muy cuadrados y poco naturales; demasiados dispararán el tiempo de cálculo. La práctica habitual es subdividir el plano hasta un término medio e ir aumentando solo si realmente hace falta más detalle.
Ejemplo típico de simulación básica de tela
Un ejercicio clásico para entender cómo funciona Cloth consiste en usar un plano como tela que cae sobre un objeto con colisión activada, por ejemplo un cubo rotando. Primero se subdivide el plano para que tenga suficientes polígonos, se asigna el modificador o simulación de tela y se activa Collision en el cubo que actuará como obstáculo.
Si al reproducir la animación se observa que la tela queda demasiado rígida o hace pliegues poco creíbles, se puede volver a subdividir la malla un nivel más, ajustar la calidad de simulación o cambiar el preset de material a uno más adecuado (por ejemplo, pasar de cuero a algodón o seda para un efecto más blando).
A partir de aquí se pueden crear ejercicios algo más avanzados, como manteles que caen sobre mesas, cortinas que se mueven al abrir una ventana o banderas que se deforman al paso del viento. La base siempre será la misma: malla con suficiente resolución, tela configurada, colisiones bien activadas y fuerzas correctamente orientadas.
Uso de pesos de vértices y Pinning of cloth
Una de las funciones más potentes y menos intuitivas al principio es la posibilidad de controlar la influencia de la simulación mediante pesos de vértices. Para esto se utiliza el modo de Weight Paint (pintado de pesos), que se selecciona en la cabecera de la ventana 3D igual que otros modos de pintado.
En este modo aparece una nueva pestaña llamada Paint en los botones de edición, donde se configuran los parámetros del pincel de pesos. El sistema usa un código de color: el rojo indica peso 1 (máxima influencia), el azul peso 0 (sin influencia) y los colores intermedios equivalen a valores de peso entre 0 y 1.
Al activar el botón Pinning of cloth en la pestaña de Cloth, Blender utiliza esos pesos para decidir qué partes de la tela se fijan y cuáles quedan libres para moverse. Por ejemplo, si pintas las esquinas de un plano con peso 1 y el resto con valores menores, podrás hacer que esas esquinas queden sujetas, como si estuvieran colgadas de una cuerda o sujetas con pinzas.
Esto permite animar fácilmente banderas, cortinas, pañuelos o cualquier tela que esté agarrada en ciertos puntos mientras el resto cuelga y se ondula. Si olvidas activar el Pinning of cloth, la tela se comportará como si no hubiera vértices fijos, pudiendo caer al suelo aunque tengas un mapa de pesos pintado.
Una vez configurado el pinning, es habitual añadir un campo de fuerza de tipo viento (Wind) mediante un objeto Empty. El eje Z del Empty marca la dirección del viento, así que se rota para que apunte hacia la tela. Después se ajusta el valor Strength hasta conseguir un movimiento creíble, evitando tanto una tela demasiado rígida como una que se vuelva incontrolable.
En ejercicios más elaborados se puede incluso añadir objetos que interactúen con la tela, como cubos que chocan con una bandera mientras esta ondea al viento. Para controlar la parte de la línea de tiempo en la que se calcula la simulación de la tela, es posible modificar el intervalo de bake por defecto (normalmente de los frames 1 a 250) en la pestaña Collision o en los ajustes específicos de Cloth.
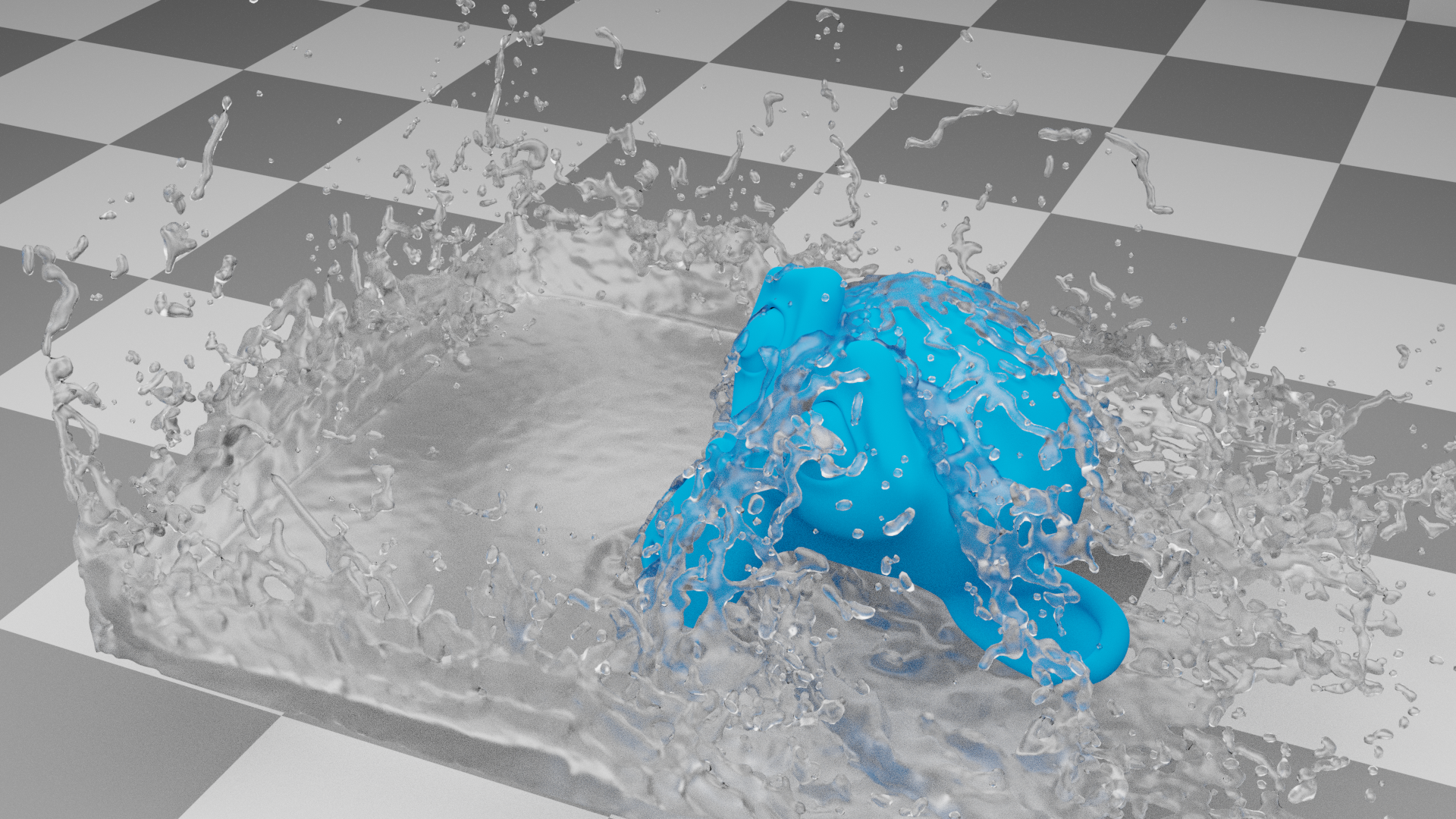
Simulación de fluidos en Blender
El simulador de fluidos es, probablemente, una de las características que más impresiona dentro del grupo de físicas, ya que permite crear líquidos que se comportan de forma bastante realista: agua llenando un vaso, chorros que salpican, fluidos que chocan con obstáculos, etc.
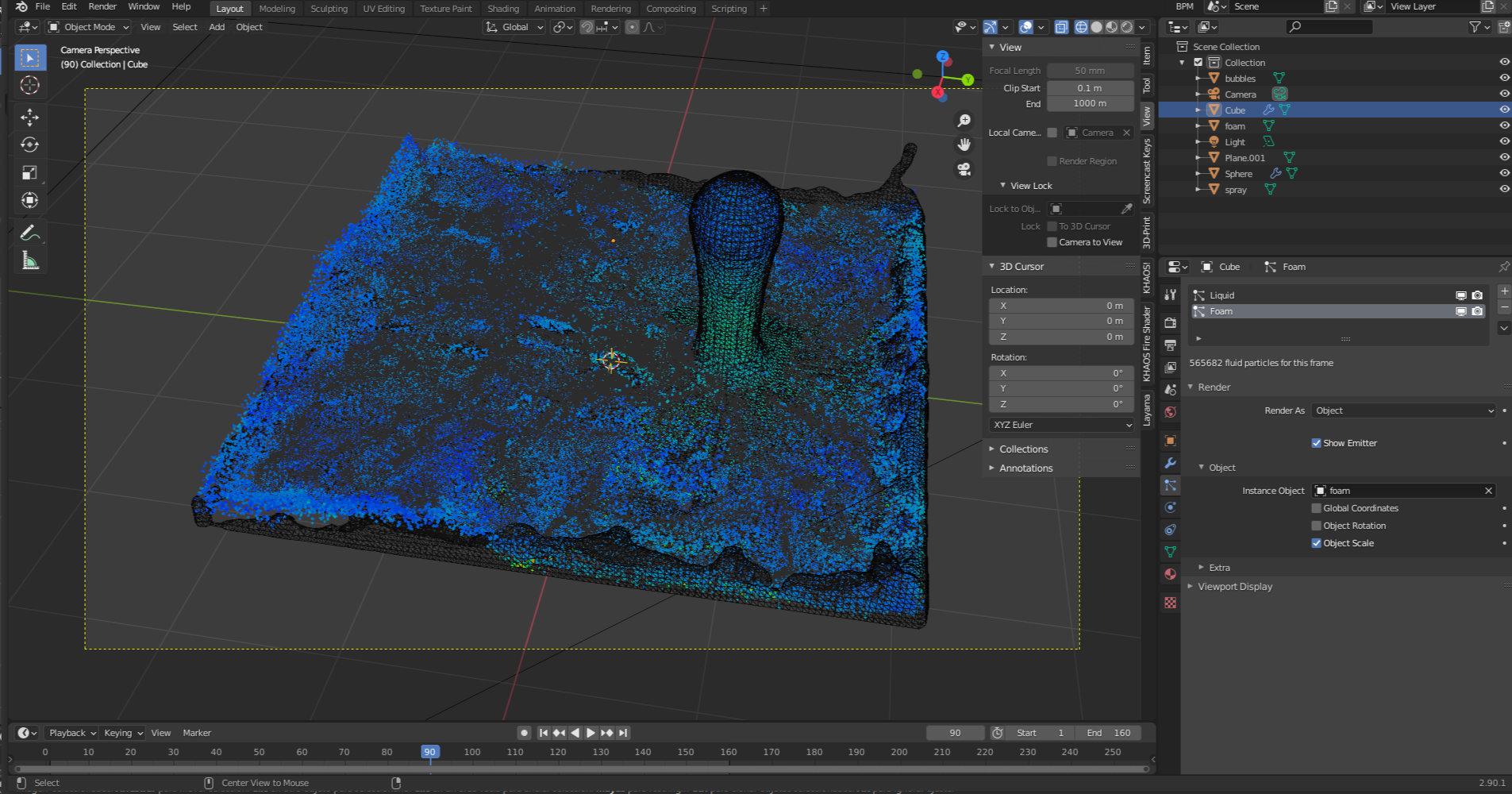
Técnicamente, este módulo genera una malla poligonal distinta para cada fotograma de la animación. Por eso es un proceso muy exigente a nivel de cómputo, tanto en tiempo como en memoria. Antes de lanzar un bake serio, es buena idea planificar bien la escena y hacer pruebas de baja resolución.
Para que una simulación de fluidos funcione, hay que definir correctamente una serie de elementos básicos en la escena: al menos un dominio (el contenedor general de la simulación), uno o varios emisores de fluido y, si es necesario, obstáculos que desvían o contienen el líquido. Cada uno de estos objetos se etiqueta con su rol concreto dentro del sistema de fluidos.
Cuando todos los elementos se han configurado con el tipo de fluido adecuado y los parámetros están más o menos ajustados, se pulsa el botón BAKE en el panel Fluid. A partir de ese momento, Blender comienza a calcular la evolución del líquido a lo largo de la línea de tiempo, generando los datos necesarios para poder reproducir la animación sin volver a simular.
Ejemplo clásico: líquido llenando un vaso
Un ejemplo muy habitual para aprender fluidos consiste en aprovechar el cubo inicial de la escena como dominio del fluido. Se suele poner en modo alambre (wireframe) para que no moleste al modelar el resto de elementos, ya que en realidad hace de contenedor invisible para la simulación.
Después se añade otro cubo con el que se modela un vaso mediante superficies de subdivisión. Una vez que el vaso tiene la forma deseada, se aplica el modificador de subdivisión para que el simulador de fluidos pueda calcular correctamente las colisiones con una geometría estable, sin cambios de topología durante el proceso.
A continuación se introduce un tercer objeto, otro cubo que hará de productor o emisor de fluido. En sus ajustes se suele establecer una velocidad inicial en el eje Z para que el líquido salga hacia una dirección concreta. Aquí es fácil cometer errores si no se presta atención a si la fuerza se está aplicando en coordenadas globales o locales.
Por ejemplo, si se fija una fuerza en Z de 0.15 unidades pero se olvida activar la opción de coordenadas locales (Local Coords/Enable), es posible que el fluido salga disparado hacia arriba siguiendo el eje Z global, en lugar de la dirección relativa al propio objeto. En ese caso, se puede deshacer la simulación (Ctrl+Z) y repetir el proceso activando la casilla correcta.
Una vez que el emisor apunta en la dirección adecuada y el dominio, vaso y obstáculos están bien definidos, se pulsa de nuevo el botón BAKE para lanzar el cálculo de la simulación. Dependiendo de la resolución establecida para el dominio y la duración de la animación, este proceso puede requerir bastante tiempo, pero devolverá una secuencia de mallas de fluido que se pueden iluminar, sombrear y renderizar como cualquier otro objeto.
En proyectos reales, es habitual comenzar con un valor de resolución bajo para el dominio, probar que el movimiento general del fluido funciona (no se sale del contenedor, la dirección es correcta, etc.) y, cuando ya está todo afinado, subir la resolución para conseguir más detalle en salpicaduras y superficies.
Jugar con la forma del dominio, la posición de los obstáculos y la velocidad inicial del emisor abre la puerta a una gran variedad de efectos: desde agua cayendo en una taza hasta vertidos más violentos que chocan contra paredes o escalones, pasando por pequeños charcos que se forman lentamente.
Todo este ecosistema de colisiones, telas, cuerpos blandos y fluidos hace que Blender sea, pese a ser libre, un contendiente serio frente a soluciones de simulación física privativas. Entendiendo paso a paso qué hace cada pestaña y tanteando los ajustes principales, es posible construir escenas muy ricas sin necesidad de recurrir a software adicional.

Redactor apasionado del mundo de los bytes y la tecnología en general. Me encanta compartir mis conocimientos a través de la escritura, y eso es lo que haré en este blog, mostrarte todo lo más interesante sobre gadgets, software, hardware, tendencias tecnológicas, y más. Mi objetivo es ayudarte a navegar por el mundo digital de forma sencilla y entretenida.